
ຊຸດ IKY ຂອງລະບົບຂັບເຄື່ອນດ້ວຍລາງຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນລົດກໍ່ສ້າງ, ລໍ້ຕິດຕາມ, ລົດຂຸດໜອນ, ລົດຕິດຕາມໂດເຊີ, ກົນໄກການຂັບເຄື່ອນຂອງໜອນຜີເສື້ອຂອງເຄື່ອງເຈາະຫຼາກຫຼາຍຊະນິດແລະເຄື່ອງຈັກຂຸດຄົ້ນບໍ່ແຮ່.
ການຕັ້ງຄ່າກົນຈັກ:
ຊຸດນີ້ໄດຣຟ໌ຕິດຕາມປະກອບດ້ວຍມໍເຕີໄຮໂດຼລິກ, ກ່ອງເກຍດາວເຄາະໜຶ່ງຫຼືສອງຊັ້ນ ແລະ ບລັອກວາວທີ່ມີໜ້າທີ່ເປັນເບຣກ. ເປືອກໝູນຂອງມັນມີບົດບາດເປັນຜົນຜະລິດເພື່ອເຊື່ອມຕໍ່ກັບລໍ້ໂສ້ຂອງລະບົບຂັບເຄື່ອນ Caterpillar. ການດັດແປງແບບກຳນົດເອງສຳລັບອຸປະກອນຂອງທ່ານແມ່ນມີໃຫ້ໄດ້ທຸກເວລາ.
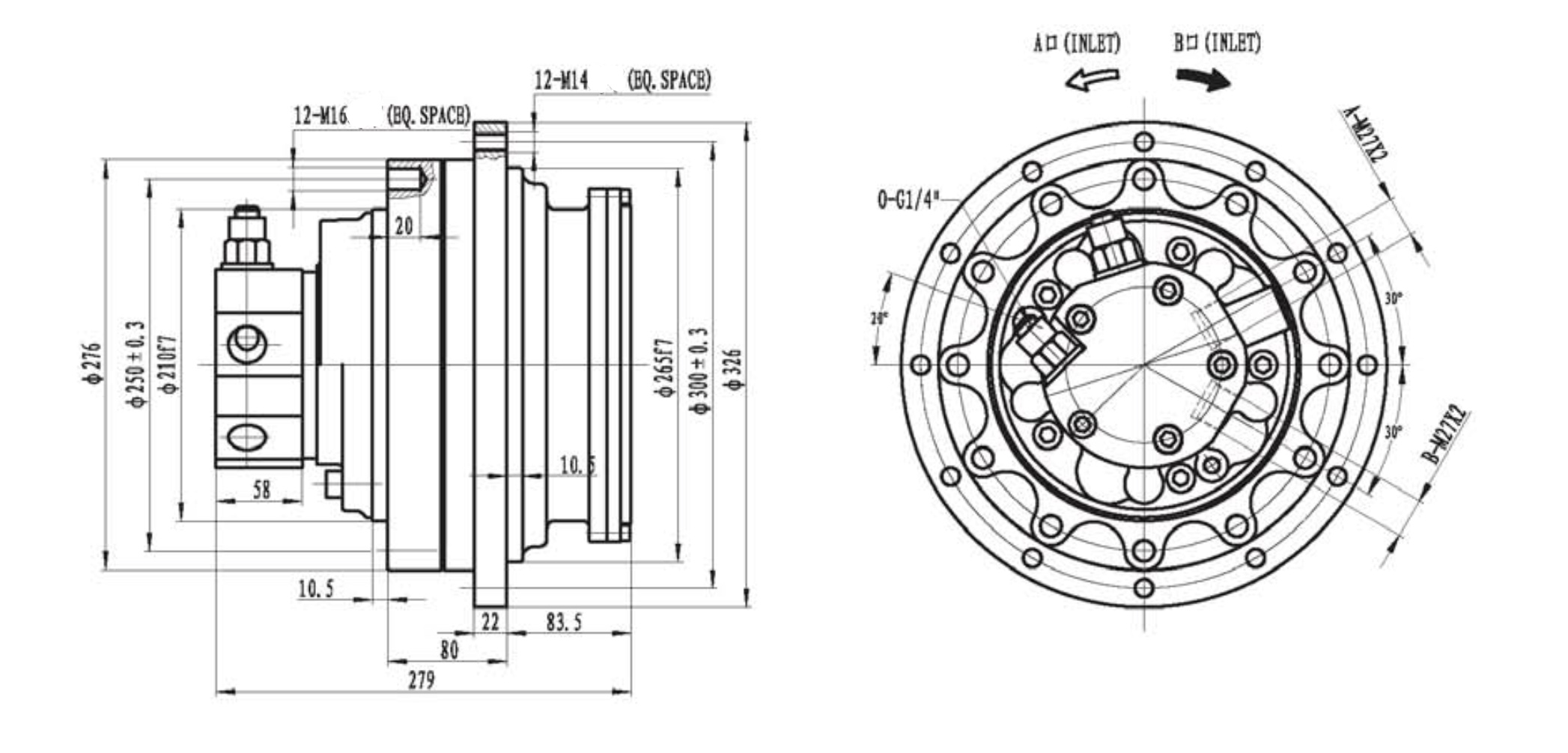
ພາລາມິເຕີຫຼັກຂອງລະບົບຂັບເຄື່ອນຕິດຕາມໄຮໂດຼລິກ IKY2.5B:
| ຮຸ່ນ | ແຮງບິດຜົນຜະລິດ Ma. (Nm) | ຄວາມໄວ (ຮອບຕໍ່ນາທີ) | ອັດຕາສ່ວນ | ຄວາມດັນສູງສຸດ (MPa) | ການຍົກຍ້າຍທັງໝົດ (ມລ/r) | ມໍເຕີໄຮໂດຼລິກ | ນ້ຳໜັກ (ກິໂລກຣາມ) | ນ້ຳໜັກພາຫະນະ (ໂຕນ) | |
| ຮຸ່ນ | ການຍ້າຍຖິ່ນຖານ (ມລ/r) | ||||||||
| IKY2.5B-1200D1202 | 3100 | 1-90 | 6 | 20 | 1146 | INM05-200D1202 | 191 | 55 | 3.5 |
| IKY2.5B-1000D1202 | 2670 | 1-90 | 6 | 20 | 996 | INM05-170D1202 | 166 | 55 | 3 |
| IKY2.5B-900D1202 | 2430 | 1-100 | 6 | 20 | 906 | INM05-150D1202 | 151 | 55 | 3 |
| IKY2.5B-900D1202 | 2080 | 1-100 | 6 | 20 | 774 | INM05-130D1202 | 129 | 55 | 2.5 |
| IKY2.5B-700D1202 | 1850 | 1-100 | 6 | 20 | 690 | INM05-110D1202 | 115 | 55 | 2.5 |
| IKY2.5B-520D1202 | 1380 | 1-110 | 6 | 20 | 516 | INM05-90D1202 | 86 | 55 | 1-2 |
| IKY2.5B-450D1202 | 1190 | 1-110 | 6 | 20 | 444 | INM05-75D1202 | 74 | 55 | 1-2 |
| IKY2.5B-570D1202 | 1550 | 1-200 | 3 | 20 | 573 | INM05-200D1202 | 191 | 60 | 1-2 |
| IKY2.5B-500D1202 | 1335 | 1-200 | 3 | 20 | 498 | INM05-170D1202 | 166 | 60 | 1-2 |
| IKY2.5B-450D1202 | 1215 | 1-210 | 3 | 20 | 453 | INM05-150D1202 | 151 | 60 | 1-2 |
| IKY2.5B-390D1202 | 1040 | 1-210 | 3 | 20 | 387 | INM05-130D1202 | 129 | 60 | 1-2 |